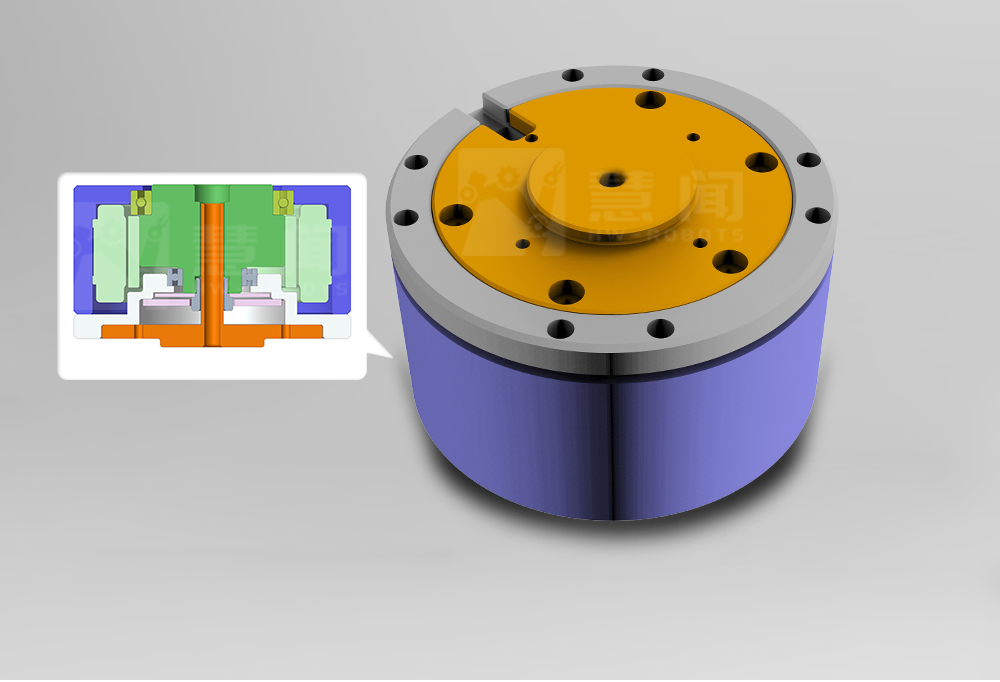
所谓工业机器人的轴能够用专业的名词自由度来解说,当机器人的轴数添加,对机器人而言,便是更高的灵活性。现在市场上运用最多的便是六轴机器人。 它是一种依托本身动力和控制才能完成各种功用且自动地实行工作的机器,能够依照预先编列的程序运转,小编为大家介绍一下六轴机器人的特征和控制方法。

六轴机器人的控制方法
六轴机器人的实践控制是由一台微型计算机完成,而别的一种是涣散式的控制,选用多台微机来分担机器人的控制,如当选用上、下两级微机共同完成机器人的控制时,主机常用于担任系统的办理、通讯、运动学和动力学计算,并向下级微机发送指令信息;作为下级从机,各关节分别对应一个CPU,进行插补运算和伺服控制处理,完成给定的运动,并向主机反馈信息。依据作业任务要求的不同,机器人的控制方法又可分为点位控制、接连轨迹控制和力(力矩)控制。
六轴机器人的特征
1、通用性:一般6轴工业机器人在实行不同的作业任务时具有较好的通用性。当然也有专用的工业机器人。
2、可编程:6轴工业机器人较大特征是柔性启动化,柔性制作系统中的一个重要组成部分。工业机器人的软件系统可随其工作环境改变和加工件的改变再编程,这样可适用于小批量多种类的具有均衡高效率的柔性制作生产线的使用。
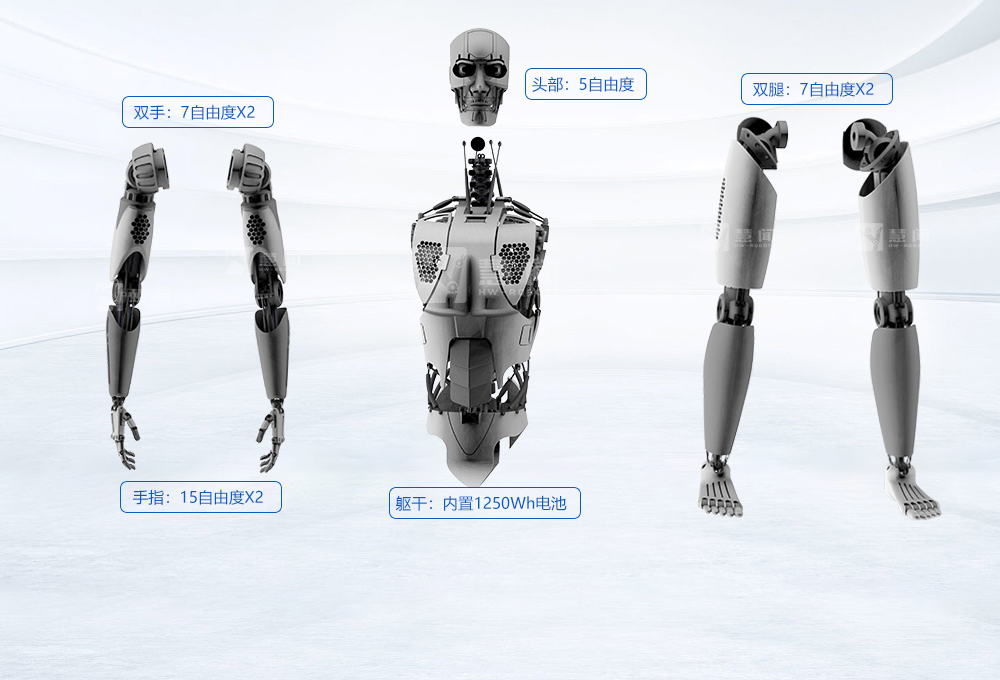
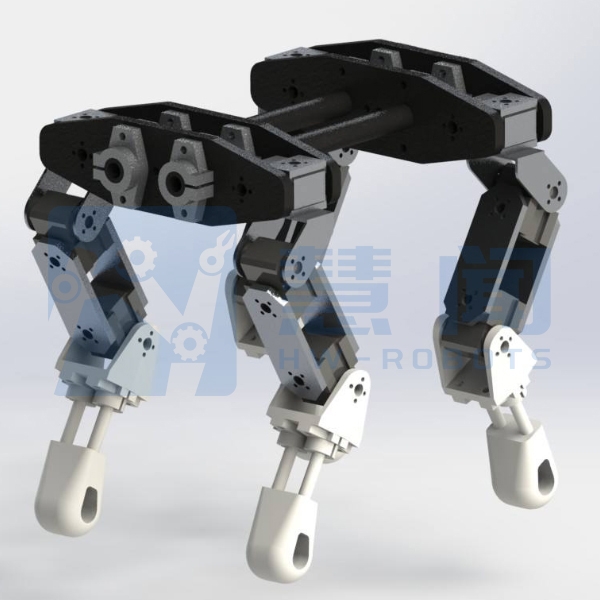
3、拟人化:6轴工业机器人结合机器人与人的特征。在6轴工业机器人的结构上有相似人的行走、腰转、大臂、小臂、手腕、手爪等部分,在控制上有电脑。其传感器提高了工业机器人对周围环境的自适应才能。

多渠道服务支持

多年经验工程师对接

企业选择应用

可签署保密协议
深圳慧闻智能有限公司
地址:中国·广东省深圳市宝安区福海街道桥头社区立新路2号天佑创客产业园A栋1楼
手机:175-0755-2151
电话:0755-85275462

微信公众号

微信号