在工业机器人规划上,常分为操控器体系、机械手(驱动体系)、示教器、视觉与传感器、结尾履行器这几个部分。机器人是一个十分复杂的体系,在机电一体化和功用性以及电气方面存在许多规划挑战,在规划机器人体系的构建块时,需要了解这些方面的需求并挑选合适的规划思路
不同操控器规划比较
大家都知道,操控器是机器人的中心,里边包括运动操控器、内部和外部通讯体系以及任何潜在的功率级。这里多提一下潜在的功率级,这个概念指的是,如果机器人要移动重物需要在电机上施加满足的力才能完成。这个力由电能发生,并从功率级提供给电机,这个功率影响机器人归于高压体系仍是低压体系。
操控器规划上有两种思路,集中式和涣散式。集中式的操控器规划将机器人的大多数电子模块(驱动电源模块、伺服驱动模块、通讯模块、IO模块)都集成在操控器中,大多机器人厂商会挑选这种规划,整体打包给下流厂商。
(协作机器人,TI)
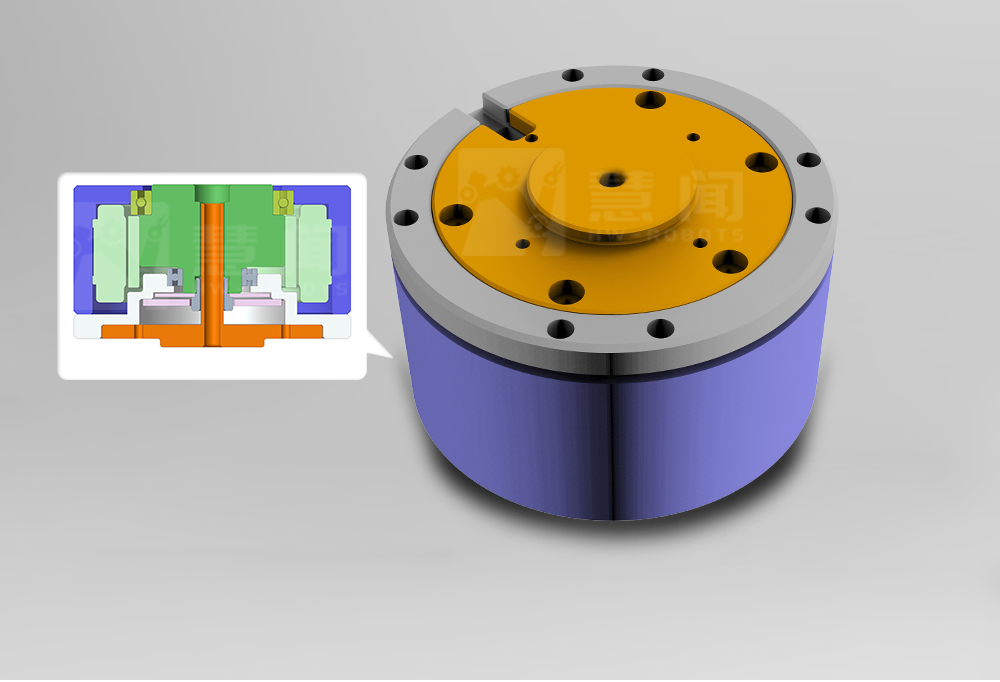
涣散式的操控器规划则是将集中式操控器里的一些模块移出到机器人的结尾操作体系中,一般都是将伺服驱动模块移出来,这样结尾的履行器能够支撑更多的外形尺寸,在电缆的挑选上灵敏度也会高一些。涣散式操控器规划的费事之处在于伺服驱动相关电子器材的运转环境与在集中式体系中彻底不同,一般需要对部分体系进行重新开发。
安全紧凑的伺服驱动器规划
工业4.0引入了伺服驱动器的新准则和体系要求,因而,机器人规划人员挑选合适当前和未来伺服驱动器需求的解决方案十分重要。现在的机器人伺服驱动器功率级模块规划,讲究的是紧凑、高效并且遭到全面维护,缺一不可。
现在机器人的功用安全标准之一IEC 61800-5-2定义了一种称为安全扭矩关闭(STO)的安全功用,为的是体系能够安全中止电机并避免意外发动。像工业机器人、工业移动机器人这种设备,一般为典型的供电电压为48V至60V的直流馈电功率级,这对体系硬件尺寸有很强的约束条件。MCU或其他处理器生成PWM,三相功率级门驱动器操控功率开关,当从外部设备接收到STO命令时,激活脉冲按捺通道以断开电源驱动与门驱动器的衔接完成安全功用。
另一方面,既然涉及功率开关,那么运用SiC、GaN来前进电机操控功能也是彻底可行的,能进一步前进机器人的功率密度和效率。这个老生常谈的话题在机器人规划中就不再赘述。
低延时即时通讯
轴数越多的机器人对网络传输的要求越高,需要运用实时通讯接口(如快速串行接口或以太网)完成jing确、安全的运动,并在一切机器人体系之间完成即时通讯。主处理器能够支撑多协议是十分必要的,如EtherCAT、PROFINET和EtherNet/IP等等,既能节省本钱、减缩布板空间和削减开发工作量,还能更大极限地削减外部组件与主机之间通讯的相关推迟。
另一方面,PHY的带宽和推迟也会极大影响机器人整个运动中的协同性。尽可能在物理层设备上缩短推迟将大幅缩短操控器收集和更新所连器材的数据所需的时间,大大改进网络更新时间。只要PHY的带宽满足,降低其推迟是提升多轴体系同步性很稳定的一个办法。
精准传感规划
机器人相关的传感,从内部的电压、电流、电机速度、温度传感到外部的扭矩传感、红外传感、3D激光雷达传感、视觉传感、IMU等等,包括的范围十分广。
在内部传感上,目前几乎一切用于机器人的传感器材都是温度敏感元件并且设置了热补偿,该趋势大大提升了内部传感应用的稳定性,消除了电机在重负载下的发热与功耗的隐患。外部传感上,跟着机器人技能的前进,交融传感器技能也在前进,将不同的传感技能结合起来,可在将机器人体系部署到变化的环境中时获得Z佳作用。
小结
跟着制造业在各个层面的高度一体化程度不断前进,机器人将在履行各种各样的使命中越来越重要,机器人开发人员需要洞悉机器人规划的发展趋势,使机器人完成jing确、安全、具有本钱效益的操作。

多渠道服务支持

多年经验工程师对接

企业选择应用

可签署保密协议
深圳慧闻智能有限公司
地址:中国·广东省深圳市宝安区福海街道桥头社区立新路2号天佑创客产业园A栋1楼
手机:175-0755-2151
电话:0755-85275462

微信公众号

微信号