最近,加州大学河岸分校的学者们开发出了一个气动随机存取存储器 (RAM),并成功用它操作软体机器人演奏了一首曲子。
用气流阀替代电子晶体管,用气动逻辑替代计算机逻辑,研讨人员成功让这个机器人摆脱了传统机电元件的操控体系。
连接其手、脑的也不再是电线,变成了通明的气流管道。
它们一端连接着气动RAM,另一端连接着机器人的手指。
经过改动管道内的气压,就能操控机器人手指按下琴键。
从单个音符、和弦到演奏一整首曲子,这个机器人都能分分钟拿下。
而这都还仅仅气动RAM小试牛刀罢了。
据研讨人员介绍,一个10位的气动RAM,就能完成900个独立履行器能完结的使命。
这有用处理了现在很多气动机器人依旧运用机电结构的困境。
并且它的体积更小、分量更轻,可以大幅下降气动软体机器人的成本、尺度和功率需求。
要知道,充气软体机器人的运用前景是十分广阔的。
由于其柔软性、安全性更高,在履行精细使命上比传统刚性机器人具备更大优势。
比方人畜无害的大白(●—●),便是一个十分典型的充气机器人。

这无疑打破了软体机器人在运用场景上的许多局限性,现在该研讨已在开放性期刊《PLOS One》上宣布。
气动RAM操控更多通路
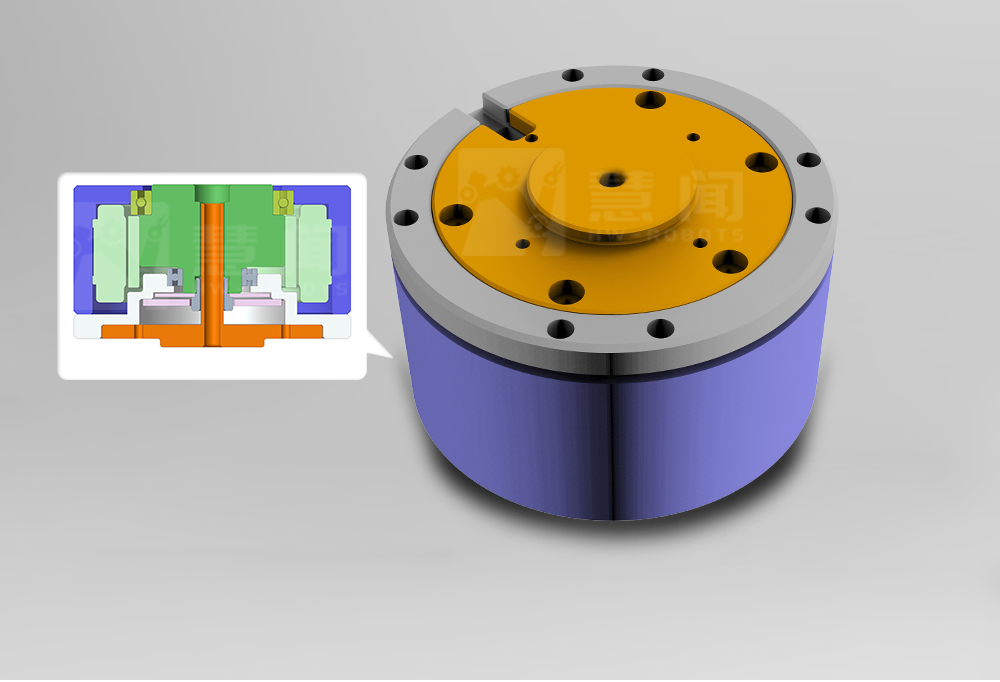
想要用气体让机器人弹奏出音乐,主要依靠两个部分:气动RAM和单片隔膜阀。
气动RAM其实是一个用微流控阀代替晶体管的随机存取存储器。
可以完成回忆、保持机器人履行器状况,主要靠的便是这个微流控阀,
它最初是被用在微流控芯片上操控液体流动,这些阀门可以在气流供应断开时,仍旧保持压力差存在。
并且这些阀门还可以组成杂乱的密集阵列,来履行很多高档操作。
比方在这个弹钢琴的软体机器人身上,研讨人员制作了一个八位的非易失性RAM。
与传统电路中单个通路操控单个履行器不同,运用气动RAM可以用n个通路操控2的n-1次方个履行器。
也便是说,相同4个通路的情况下,气动RAM可以操控8个机械手指的独立性操作。
那么机械手指是怎么弯曲并敲下琴键的呢?
这时就需要气流上台了。
气动RAM所操控的单个通路上,都有一个隔膜阀。
它主要由输入通道、输出通道和操控通道组成,中间有一个可移动的硅膜。
经过改动操控通道中的气压,让硅膜移动,从而操控气阀中气流的流动。
当操控通道为真空状况时,硅膜就会被拉入操控通道,与此同时输入-输出通道打开,气流经过。这就表明为信号1,机械手指此时会弯曲。
当操控通道中有气压时,硅膜堵死整个通道,此时表明信号0,手指则为舒展状况。
考虑到传统单片隔膜阀的气流速度不够高,大型或移动速度快的机器人无法运用,研讨人员还对此进行了改善。
他们运用了多个标准相同的输入、输出通道,一方面消除了发生意外通路的可能,另一方面提高了气流经过速度。
经过改动不同通道内的气压,研讨人员可以机器人在钢琴上演奏出音符、和弦,甚至是一整首歌曲。
值得一提的是,这个机器人的整套体系中,只有抽取真空的泵是用了电池的,其他部分没有任何机电硬件,安全性很高。
并且一个10位的气动RAM就能包含2046个通路,每个阀门的面积仅为7平方毫米,这使得一个10位的气动RAM差不多只有一个智能手机屏幕那么大。
由于其安全、简便的特性,将来可用于低龄残障儿童的可穿戴设备上。
值得一提的是,今年2月加州大学圣地亚哥分校的研讨人员们也研发出了一款无电子元件、由气体驱动的软体机器人,并登上《Science Robotics》的封面。
这个机器人的每条腿都由3条可伸缩的充气橡皮管制造而成,四条腿呈X形相连,经过充气或漏气的规划就能走起路来。
与机电组件组成的机器人比起来,简便不少。
它的中心其是一种由软阀规划的环形振荡器。
而今年6月,一个充气挖掘机器人也登上《Science Robotics》封面。
看来,气体软体机器人真的是一个热门研讨范畴啊!
说不定,有朝一日我们真的能看到实际版的大白呢~

多渠道服务支持

多年经验工程师对接

企业选择应用

可签署保密协议
深圳慧闻智能有限公司
地址:中国·广东省深圳市宝安区福海街道桥头社区立新路2号天佑创客产业园A栋1楼
手机:175-0755-2151
电话:0755-85275462

微信公众号

微信号