工业机器人广泛使用在产业制造上,汽车制造、电器、食品等,能替代反复机器式操纵工作,是靠本身动力和控制才能来实现种种功用的一种机器。它能够承受人类指挥,也能够按照事先编排的程序运转。如今我们讲讲工业机器人基本主要构成部分。
1.主体
主体机械即机座和实行机构,包括大臂、小臂、腕部和手部,构成的多自由度的机械系统。有的机器人另有行走机构。工业机器人有6个自由度乃至更多腕部通俗有1~3个活动自由度。
2.驱动系统
工业机器人的驱动系统,按动力源分为液压,气动和电动三大类。依据需求也可由这三种范例组合并复合式的驱动系统。或者通过同步带、轮系、齿轮等机械传动机构来间接驱动。驱动系统有动力装置和传动机构,用以实行机构发生相应的动作,这三类根本驱动系统的各有特点,现在主流的是电动驱动系统。
3.控制系统
机器人控制系统是机器人的大脑,是决定机器人功用和功能的主要要素。控制系统是按照输入的程序对驱动系统和实行机构收回指令信号,并进行控制。工业机器人控制技术的主要任务便是控制工业机器人在工作空间中的活动范围、姿势和轨迹、动作的时间等。具有编程简单、软件菜单操纵、友好的人机交互界面、在线操纵提示和运用方便等特点。
4.感知系统
它是内部传感器模块和外部传感器模块的构成,获取内部和外部的环境状态中有意义的信息。
内部传感器:用来检测机器人本身状态(如手臂间的角度)的传感器,多为检测位置和角度的传感器。具体有:位置传感器、位置传感器、角度传感器等。
外部传感器:用来检测机器人所处环境(如检测物体,距离物体的距离)及状况(如检测抓取的物体是否滑落)的传感器。具体有距离传感器、视觉传感器、力觉传感器等。

5.末端执行器
末端执行器连接在机械手最后一个关节上的部件,它一般用来抓取物体,与其他机构连接并执行需要的任务。机器人制造上一般不设计或出售末端执行器,多数情况下,他们只提供一个简单的抓持器。通常末端执行器安装在机器人6轴的法兰盘上以完成给定环境中的任务,如焊接,喷漆,涂胶以及零件装卸等就是需要机器人来完成的任务。
伺服电机的概述
伺服驱动器又称为“伺服控制器”、“伺服放大器”,是用来控制伺服电机的一种控制器,其作用类似于变频器作用于普通交流马达,属于伺服系统的一部分。一般是通过位置、速度和力矩三种方式对伺服电机进行控制,实现高精度的传动系统定位。
1. 驱动器接线
伺服驱动器主要有控制回路电源、主控制回路电源、伺服输出电源、控制器输入CN1、编码器接口CN2、连接起CN3。控制回路电源是单相AC电源,输入电源可单相、三相,但是必须是220v,就是说三相输入时,咱们的三相电源必须经过变压器变压才能接,对于功率较小的驱动器,可单相直接驱动,单相接法必须接R、S端子。
2. 编码器接线
从上图看出九个端子我们只使用了5个,一个屏蔽线、电源线两根、串行通讯信号(+-)两根,与我们普通的编码器接线差不多。
3. 通讯端口
驱动器通过CN3端口与电脑PLC、HMI等上位机相连接,采用MODBUS通讯来控制驱动器,可使用RS232、RS485进行通讯。
机器人重要参数
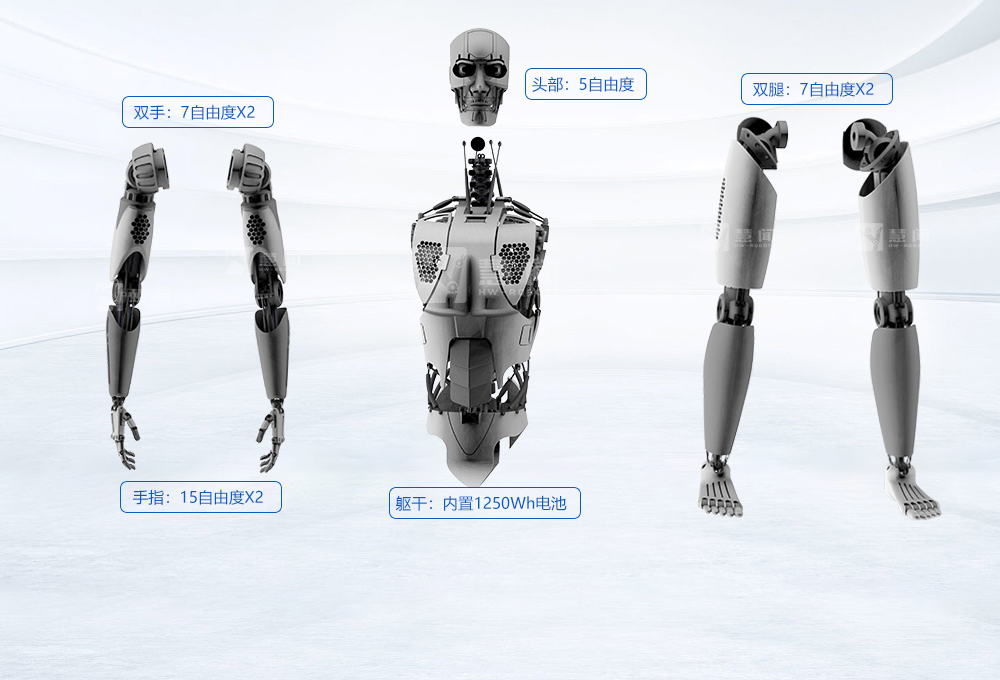
1、自由度
是指机器人具有的独立运动的坐标轴数量。
机器人的自由度是指确定机器人手部在空间的位置和姿态时所需要的独立运动参数的数量。机器人的自由度数一般等于关节数量。常见机器人自由度数一般有5~6个。有些机器人还附带有外部轴。
2、关节(Joint)
即运动副,允许机器人手臂各零件之间发生相对运动的机构。
3、工作范围
工业机器人手臂或手部安装点所能达到的所有空间范围。
其形状取决于机器人的自由度数和各运动关节的类型与配置。机器人的工作范围一般有:图解法和解析法这两种方法表示。

4、速度
机器人在工作过程中带载荷条件下、匀速运动过程时,机械接口中心或工具中心点在单位时间内所移动的距离或转动的角度。
5、工作负载
是指机器人手腕前端安装负荷在工作范围内任何位置上所能承受的重量,一般用质量、力矩、惯性矩表示。还和运行速度和加速度大小等参数有关,工作负载一般用高速运行时机器人所能抓取的工件重量作为负载承受能力为指标。搬运机器人的负荷重量,必须考虑抓手和工件的合计。
6、分辨率
是指机器人能够实现的最小移动距离或最小转动角度 。
7、精度
重复性或重复定位精度:指机器人重复到达某一目标位置的差异性。比如你要求一个轴走 100 mm 结果 第 一次 实际上他走了 100.01 重复一次同样的动作 他走了99.99 这之间的误差 0.02 就是重复定位精度。它是衡量一列误差值的集中程度,即重复度。机器人精度机不单取决与关节减速机及传动装置,且对机械装配工艺存在很大关系,很多由于装配不到位导致机器人重复定位精度下降。

多渠道服务支持

多年经验工程师对接

企业选择应用

可签署保密协议
深圳慧闻智能有限公司
地址:中国·广东省深圳市宝安区福海街道桥头社区立新路2号天佑创客产业园A栋1楼
手机:175-0755-2151
电话:0755-85275462

微信公众号

微信号