电话: 13510191727
邮 箱: james@huiwen-ai.com
网 址:www.huiwen-ai.com
地 址: 中国·广东省深圳市宝安区福海街道桥头社区立新路2号天佑创客产业园A栋1楼
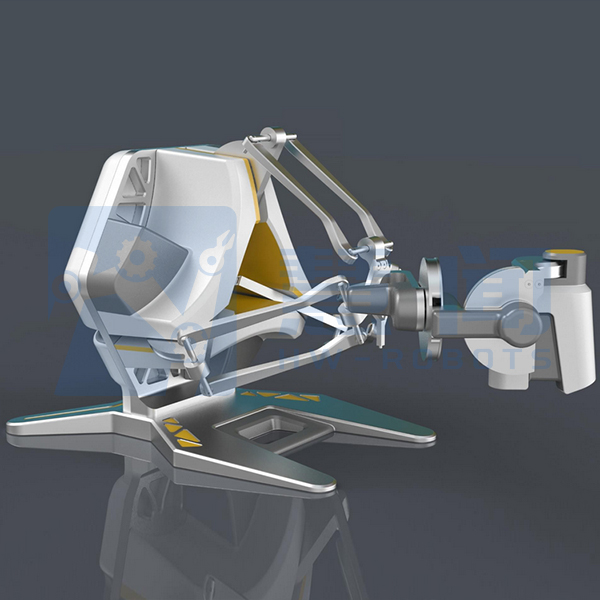
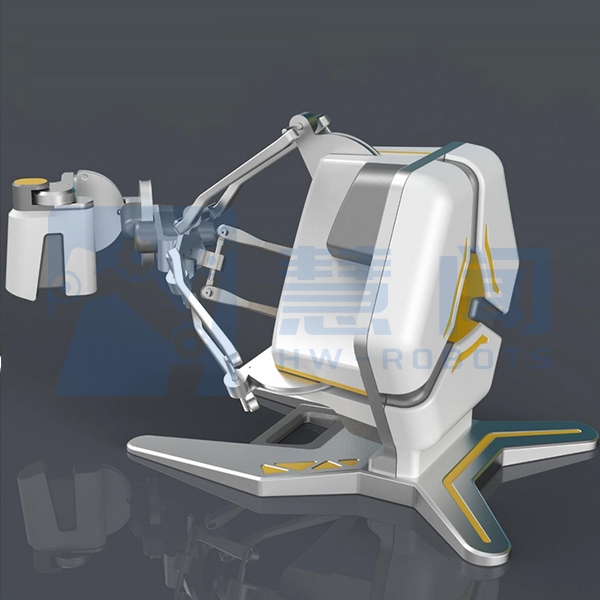
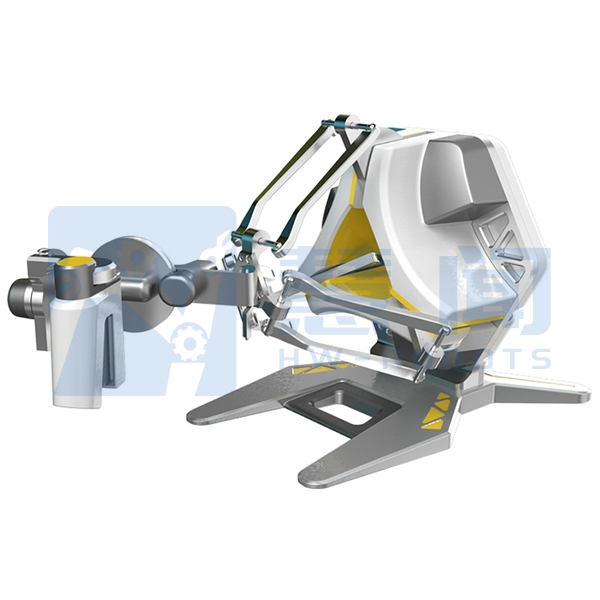
产 品 名 称: 六自由度力反馈操作手柄 六自由度机器人项目研发
技术指标 | |
工 作 空 间: | 平动 直径160mm × 高度110mm 圆柱体 |
转 动: | 230度 × 180度 × 200度 |
输 出 力: | 平动 12N,转动 400mNm |
分 辨 率 : | 平动 0.01mm,转动 0.015度 |
刚 度: | 15N / mm |
接 口: | RS232 / RS422 / USB2.0 |
电 源: | 220V / 50Hz |
软件 | |
操 作 系 统: | Windows, Linux, Mac OS |
软件开发包: | VTK,Chai3D |
特性 | |
结 构: | Delta平动并联机构,串联转动机构 |
校 准: | 开机自动校准,重力补偿 |
用 户 输 入: | 可编程按钮输入 |
| 特 殊 要 求: | 根据需要进行定制 |
应用领域
六自由度平动力反馈操作手柄提供精准的力觉反馈和位置指令输出,应用领域包括:
● 医疗手术机器人
● 遥操作系统
● 力反馈操控装置
● 虚拟仿真
● 技术研究