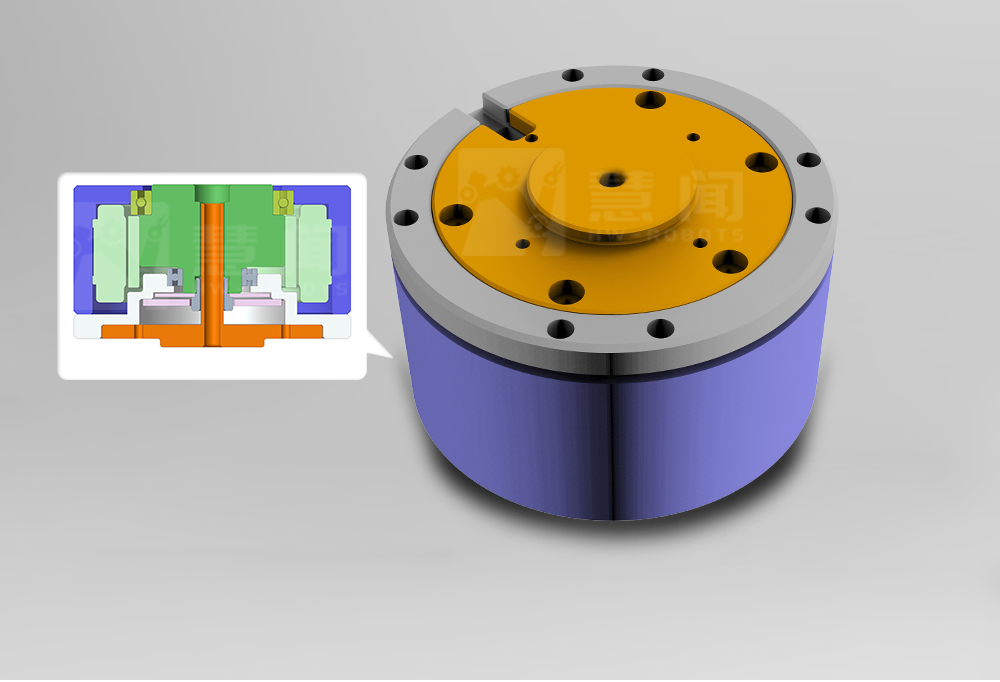
机器人模块化关节介绍:本实用新型提供了一种机器人模块化关节,包括设置在机器人关节外壳内的关节定子、关节转子、电机定子、电机转子、空心轴、谐波减速器及与机器人关节外壳对应的关节端盖,其中:电机转子转动设置在空心轴一端,电机定子位于电机转子外侧;谐波减速器位于空心轴另一端,包括椭圆凸轮、刚轮和柔轮,椭圆凸轮转动设置在空心轴上,柔轮套装在椭圆凸轮上,刚轮设置在柔轮外,且柔轮外齿和刚轮内齿啮合。本实用新型所述的一种机器人模块化关节,采用一体化融合设计,分别把电机定子、电机转子直接固定在关节上,删减了原电机模块的电机外壳、电机前后端盖等不必要的零件,减少了关节总体的零件数量,从而减小了关节尺寸,降低关节重量。



多渠道服务支持

多年经验工程师对接

企业选择应用

可签署保密协议
深圳慧闻智能有限公司
地址:中国·广东省深圳市宝安区福海街道桥头社区立新路2号天佑创客产业园A栋1楼
手机:175-0755-2151
电话:0755-85275462

微信公众号

微信号