七自由度力反馈手柄的开发及其控制方法
【技术领域】
[0001] 本发明是一种智能化的三自由度的力反馈设备,主要应用于航天、深海或对人有 害环境中机器人控制和虚拟现实领域,能够测量转动角度并提供力觉临场感。
【背景技术】
随着交互式遥操作机器人和虚拟现实技术的广泛应用,尤其是一些近些年来新出 现的实用技术如远程教学,远程医疗,以及虚拟现实技术等对临场感机器人技术的很强的 依赖性,使得高性能的人机接口装置显得尤为重要。力反馈操纵装置作为常见的一种人机 接口,它能采集操作者手臂的位姿信息作为控制指令,生成控制命令控制远端操作对象或 者虚拟对象的运动,并实现对象传回的力觉信息直接生成作用于人手的反馈力或力矩,是 操作者产生远地机器人现场或虚拟机器人现场身临其境的力觉临场感效果。近年来,力反馈手控器已经成为了各国科研人员的研究热点,欧美国家,已经有了像Omega和Delta这样 的成熟的力反馈设备产品上市,并处于领先水平,国内对力反馈设备的研究也取得了 显著的进展。一般力反馈装置可以分为串联式力反馈装置,并联式力反馈装置,混联式力反 馈装置。串联式力反馈设备的特点是开链结构,刚度较差易变形,不易产生较大的反馈力; 并联式力反馈设备惯性低,在刚度、精度、反向驱动能力上有很大的优势,但是缺点是体积 较大;而混联式力反馈设备则结合了串联式和并联式的优点,同时体积也比较大。目前提出 的很多力反馈操纵装置没有设置智能化控制效果,例如不能实现自动复位。

随着我国空间机械臂技术研究的不断深入,专业人员将可以通过大尺寸空间机械臂遥操作的方式完成空间站舱外设备的安装、更换、维护,空间站舱段转位与辅助对接,以及有效载荷的运送等工作。要求空间机械臂遥操作系统具有向操作者提供有益的力觉信息的能力,以提高遥操作系统的临场感和透明感,帮助专业人员操控空间机械臂完成精细动作。
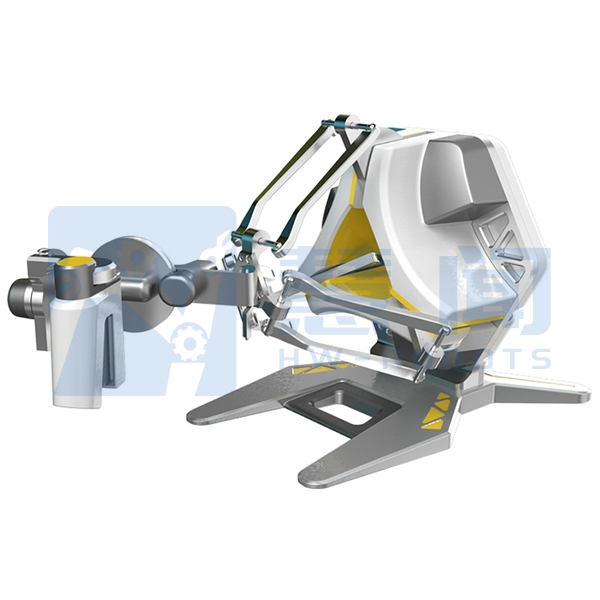
针对空间机械臂遥操作任务的需要,本文面向专用力觉交互设备展开研究工作,设计了用于机械臂末端位置控制的三自由度平动力反馈手柄样机,探索并研究了手柄设计中的关键问题,包括构型选择,运动学、速度、奇异位形分析,尺寸参数综合,机械结构和控制系统设计和虚拟力渲染模型,完成样机功能验证实验。主要研究内容如下:
首先,根据遥操作的任务特点,分析并确定力反馈手柄详细设计指标。采用DELTA机构作为手柄机械构型,完成DELTA机构自由度、正、反向运动学、速度和奇异位形的分析,为尺寸综合,机械设计及手柄的运动、力控制提供可靠的基础。
其次,提出了基于遗传算法的分步式尺寸综合方法。该方法将DELTA机构力反馈设备作为研究对象,在外形尺寸、任务空间和最 大连续输出力的约束下,以提高任务空间内全域力各向同性度为目标,分三个步骤使用遗传算法确定了手柄设计的全部尺寸参数,并完成机构模型的验证工作。
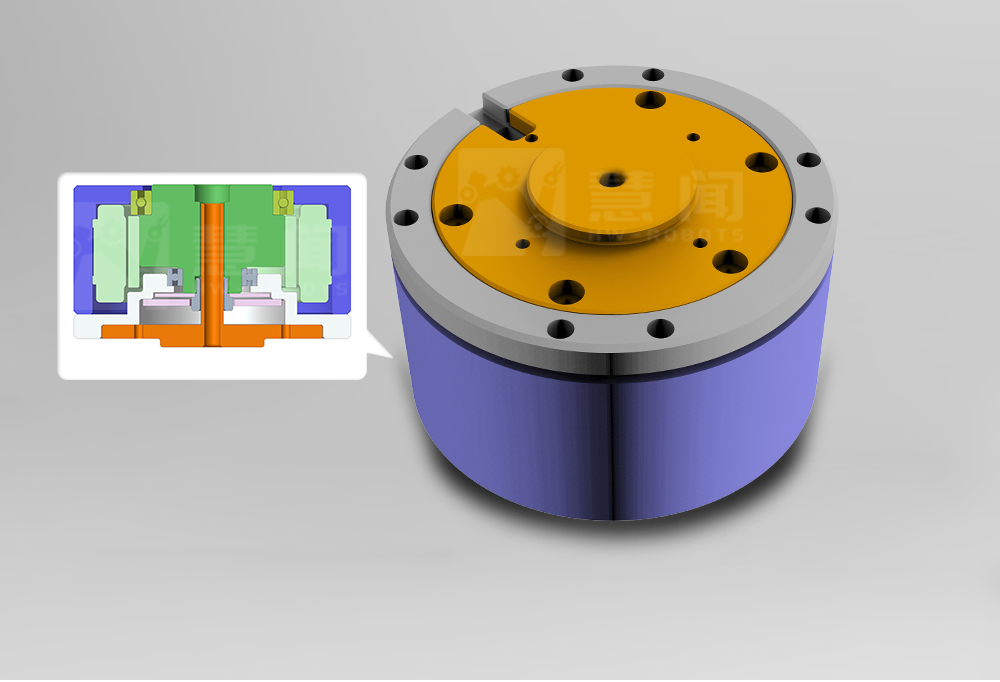
再次,完成力反馈手柄系统的详细设计工作。手柄机械结构分为基座、传动、末端、限位等不同模块组件进行设计和介绍。基于实验室研发的力反馈设备控制卡,完成控制系统硬件的选型和搭建,编写用于手柄调试的上位机软件。
最后,面向空间机械臂遥操作任务中力觉交互的需求,研究了力反馈手柄的重力补偿、自动复位和虚拟刚度模型,并分别进行了实验验证。建立虚拟机械臂遥操作场景,提出虚拟操作辅助力和环境交互力模型,完成舱体与空间站轴孔对接任务实验。

多渠道服务支持

多年经验工程师对接

企业选择应用

可签署保密协议
深圳慧闻智能有限公司
地址:中国·广东省深圳市宝安区福海街道桥头社区立新路2号天佑创客产业园A栋1楼
手机:175-0755-2151
电话:0755-85275462

微信公众号

微信号