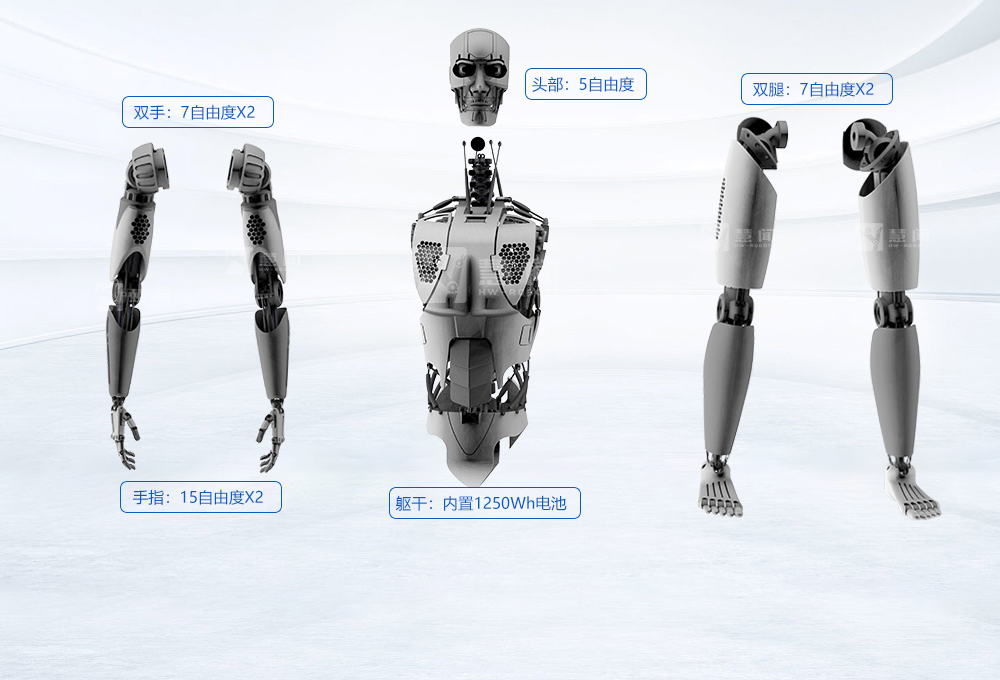
模块化机器人是由一系列标准的关节模块和衔接模块构成的机器人开发体系。模块化关节是模块化机器人的中心组成部分,每个模块化关节具有标准的机械和电气接口。模块化机器人的突出优点是可重构、易维护、高灵活性和可靠性,具有很广泛的应用前景。
本文依据国家863方案项目"空间实验室舱内机器人综合服务体系"中提出的模块化规划思维,进行了模块化关节的规划和研讨作业。 在剖析国内外模块化关节研讨现状并结合课题要求的基础上,完成了模块化关节的总体方案的规划和剖析证明。
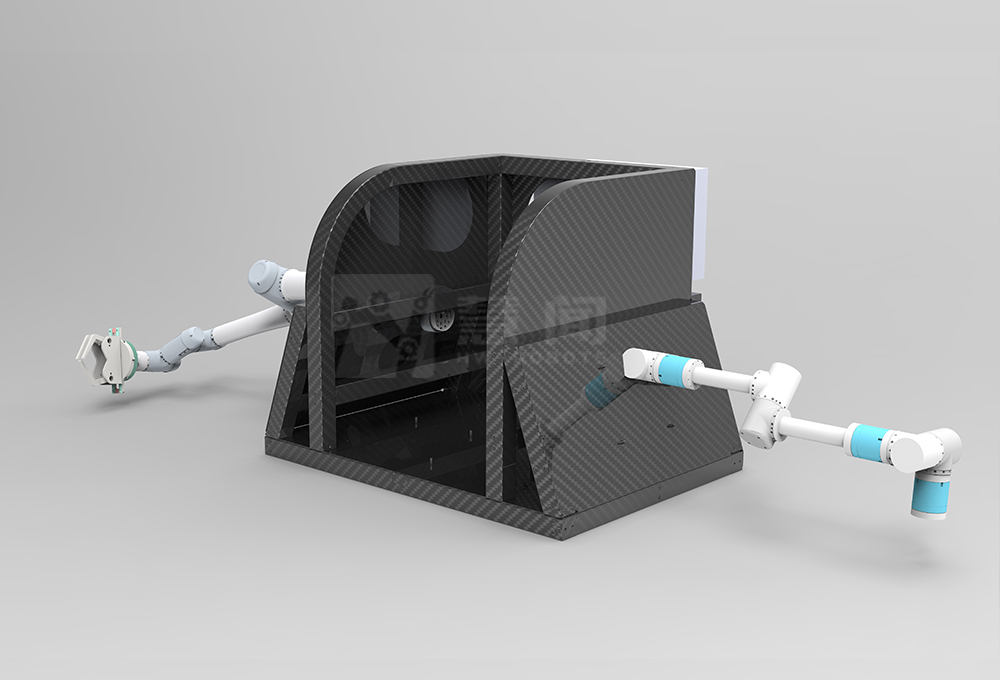
依据模块化机器人的任务要求,选用自顶(结尾手爪)向下(机座)逐级递推的办法计算出模块的各关节所受的至大力矩;建立了模块几何尺寸差错与机器人结尾手爪至大方位差错之间的关系模型,并通过该模型计算出机器人结尾手爪至大方位差错。
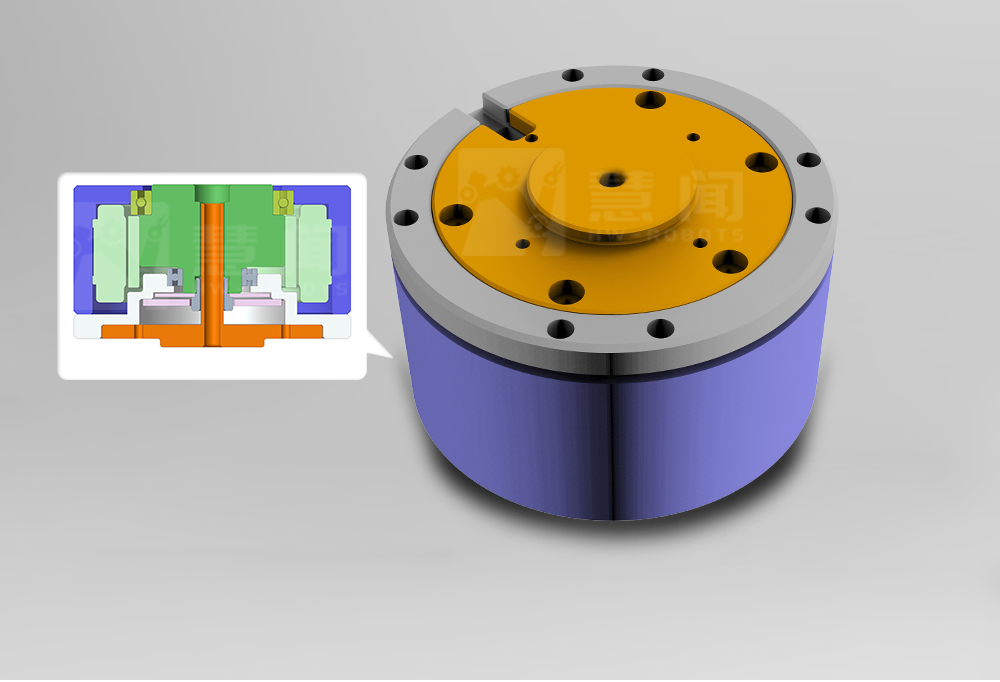
最后确定了模块化关节的规划目标,并完成了模块化关节首要部件的选型。 依据三分支模块化机器人的技能要求,选用模块化规划思维规划了一种集机械体系、驱动体系、传感体系、控制体系和电源体系为一体、具有标准机械与电气接口的机器人模块化关节。具体规划了一种基于应变式原理、选用成十字散布的弹性梁结构的关节力矩传感器,使关节具备转矩和弯矩过载维护能力。完成了模块化关节材料的选用、具体结构规划、走线规划、体系集成规划、多种衔接模块规划等作业。


多渠道服务支持

多年经验工程师对接

企业选择应用

可签署保密协议
深圳慧闻智能有限公司
地址:中国·广东省深圳市宝安区福海街道桥头社区立新路2号天佑创客产业园A栋1楼
手机:175-0755-2151
电话:0755-85275462

微信公众号

微信号