电话: 13510191727
邮 箱: james@huiwen-ai.com
网 址:www.huiwen-ai.com
地 址: 中国·广东省深圳市宝安区福海街道桥头社区立新路2号天佑创客产业园A栋1楼
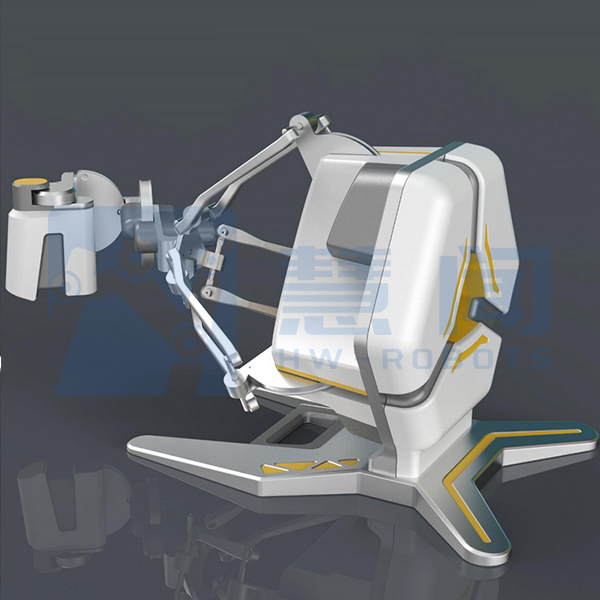
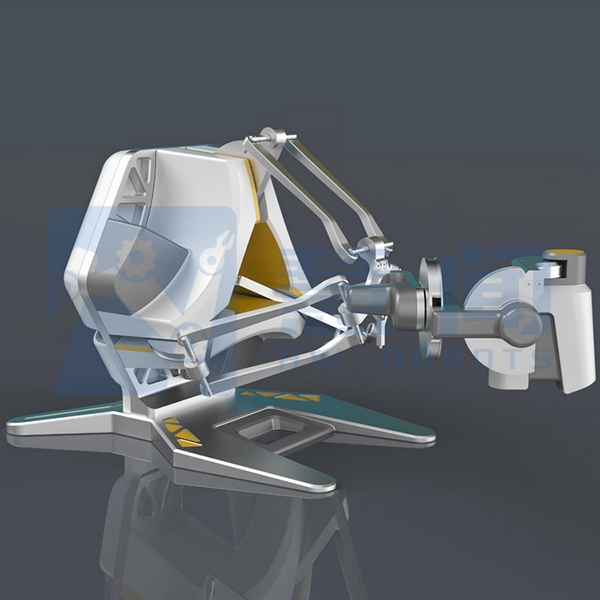
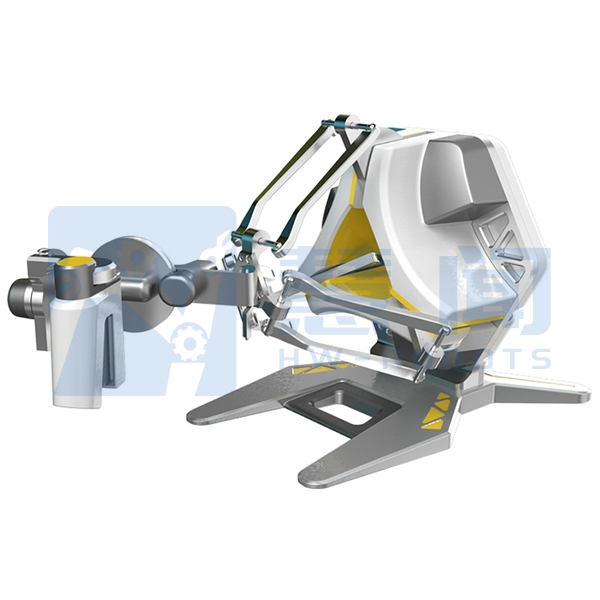
产品名称:力反馈操作手柄 机器人开发
六自由度力反馈操作手柄依靠独特的Delta并联机构和串联转动机构复合设计,使其成为具有高度灵活性的精密力反馈设备,可实现高精度的平动转动联合控制。并联平动机构使其具有较高的刚度和强劲的输出力,串联转动机构提供了更大转动空间,自动校准能力为其高定位精度提供了保障。机械结构采用高强度航空铝合金经数控加工成型,关键运动部件均采用国际领先品牌。手柄支持多种操作系统开发平台,开放的软件平台提供良好的二次开发环境,提供RS232、RS422、USB2.0等多种控制接口方便连接。


机器人开发应用领域:
六自由度平动力反馈操作手柄提供精准的力觉反馈和位置指令输出,应用领域包括:
● 医疗手术机器人
● 遥操作系统
● 力反馈操控装置
● 虚拟仿真
● 技术研究