慧闻协作机器人精度和质量;上海外骨骼机器人具有高度的可重复性,即便在全天候24小时运行的情况下也可以达到 ±0.03mm的精度,可确保缩短周期时间,并减少原材料浪费。除执行生产任务外,配备摄像机系统的机械臂还可以执行3D 测量和测试等质量控制任务。 在进入下一步流程之前识别出故障零件也可以减少浪费。优化效率和劳动力。外骨骼机器人研发公司可以将员工从单调、耗时的任务中解放出来,使得他们有更多的时间专注于附加值更高的任务。在员工从事适合于其技能的任务时,协作式机器人可以执行劳累而又危险的工作,从而保护工人免受因人体工程学差、重复性应力带来的健康风险,或因重型或锋利工件造成的人身伤害。
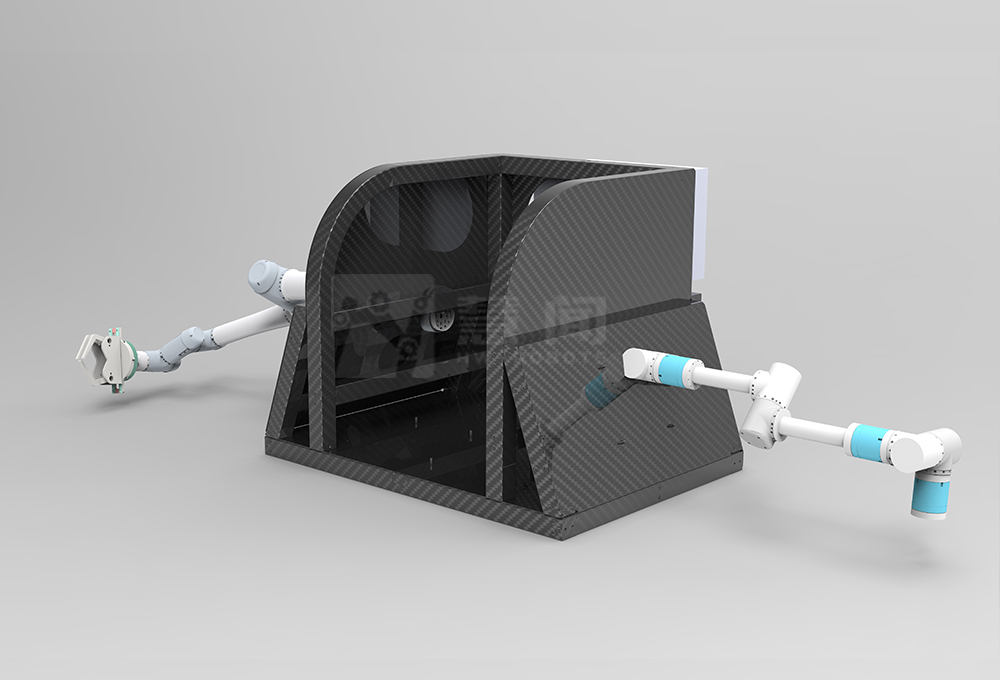
七轴协作机械臂的好处:够接受指令,精确地定位到三维(或二维)空间上的某一点进行作业。机械手臂是机械人技术领域中得到最广泛实际应用的自动化机械装置,在工业制造、医学治疗、娱乐服务、军事、半导体制造以及太空探索等领域都能见回到它的身影。手臂一般有3个运动:伸缩、旋转和升降。实现旋转、升降运动是由横臂和产柱去完成。外骨骼机器人研发公司的基本作用是将手爪移动到所需位置和承受爪抓取工件的最大重量,以及手臂本答身的重量等。机械手是一种能模仿人手和臂的某些动作功能,用以按固定程序抓取、搬运物件或操作工具的自动操作装置。特点是可以通过编程来完成各种预期的作业,构造和性能上兼有人和机械手机器各自的优点。上海智能外骨骼机器人是较早出现的工业机器人,也是较早出现的现代机器人,它可代替人的繁重劳动以实现生产的机械化和自动化,能在有害环境下操作以保护人身安全,因而广泛应用于机械制造、冶金、电子、轻工和原子能等部门。
学习机器人专业需要有丰富的想象力和超强的记忆力。需要涉及到的学科比较多;例如要懂得(机械设计与制造)、还要学习力学、数学等等。机器人专业里面包罗万象,其中机器人行走步伐、智能外骨骼机器人动作的自由角度的大小。包括机器人的所有关节是如何驱动的,如何让机器人自己按照人们规划的程序进行仿真运动。如何保证机器人在运动轨迹上运动时的安全等等。正是由于“机器人学”的门槛要求很高,各种基础知识纵横交错,而且学科之间的依赖程度众多。所以真正培养出来一名出色的机器人专业的工程师比较困难。不过泱泱大国人众多,每年从高校的学生中的确出来不少机器人专业的高手。“机器人”一词经常出现在科幻小说、动画片和美国的电影中。如今在工厂里面可以看到进行作业的机器人,在现实生活中,外骨骼机器人研发公司不仅仅是代替了人工劳动,而是综合了人和机器特长的一种类似于人的电子机械装置。这种电子装置在具备人对环境状态的快速反应和分析判断能力的同时,还具备机器可长时间的持续工作,并且它所控制加工的工件的精度高,抵抗恶劣环境的能力。从普通意义上讲,可以认为机器人是机器进化过程中的产物,是工业以及非产业界的重要生产和服务性的设备,也是先进制造技术领域不可缺少的自动化设备。

又众所周知,一般六轴机械臂的一个末端姿态会对应几组不同的逆解。但是,这几组逆解在构形空间内是离散分布的,一般情况下无法在保证末端位姿的情况下从一组逆解变换到另一组逆解:换句话说,让外骨骼机器人研发公司末端走一条固定轨迹,如果两个点中间存在一些不可通过的点,那么六轴机械臂是无法完成这条轨迹的。但是,对于七轴机械臂的话,它多了一个冗余自由度,存在无数组在构形空间内连续的逆解,换句话说,有可能在保证末端轨迹的同时避开奇异的和障碍物。对于为什么不做八轴、九轴机械臂,答案也很简单,七轴大部分情况下已经够用了,增加关节只会降低整个机构的刚度。简言之,上海外骨骼机器人是兼顾柔性与刚度的一种构型。巧的是,人的手臂也是七自由度的。于是,我们会有另一个问题:为什么大家不一开始就做七轴,而大多是以六轴起步呢?原因大概是因为以前大家认为七轴机械臂的运动学不存在解析解吧。我们知道,机器人的底层控制器是需要实时的进行轨迹插补的,如果是对末端轨迹进行插补,就需要在一个伺服周期(<1ms)内多次计算运动学逆解。
上海外骨骼机器人和协作机器人都是做重复的规定动作,从这点上看没有区别,只有这样自动化程度也才会高。人机协作机器人设计出来的目的就是克服传统机器人的一部分缺点,并且专攻更细的精细操作和定制化操作的市场,并不能取代传统机器人,虽然现在也没有得到大范围的应用,主要看协作机器人的负载,你就知道大型部件是无法加工的。体积小是协作机器人的一个优势,这个优势存在的前提是外骨骼机器人研发公司和传统工业机器人都能够胜任这个任务。因为体积小,重量轻,安装和调试简单,同样的一台机器可以相对方便的移动位置(协作机器人两个人就可以重新布置),重新进行教导,极大的提高了生产线的柔性,减少的投入。而反观传统工业机器人,位置发生些许变化都要人工拿着控制器调半天,更别说如果为了新的生产工序移动位置,整个地板和围栏要重做,基本就跟重新安装一样的麻烦。以机器人为例,因为对他们了解的比较多,他们也在深圳建立了自己的机器人生产工厂。在研发生产协作机器人的时候,他们从最开始研发生产伺服系统及运动控制系统,到转型生产协作机器人关节模组,最后自己主打研发协作机器人,完全国产化的机器人关节模组,到协作机器人,因为专业,所有更加专注,期待深圳 深圳慧闻智能有限公司可以在协作机器人应用领域又更多的突破和发展。

多渠道服务支持

多年经验工程师对接

企业选择应用

可签署保密协议
深圳慧闻智能有限公司
地址:中国·广东省深圳市宝安区福海街道桥头社区立新路2号天佑创客产业园A栋1楼
手机:175-0755-2151
电话:0755-85275462

微信公众号

微信号