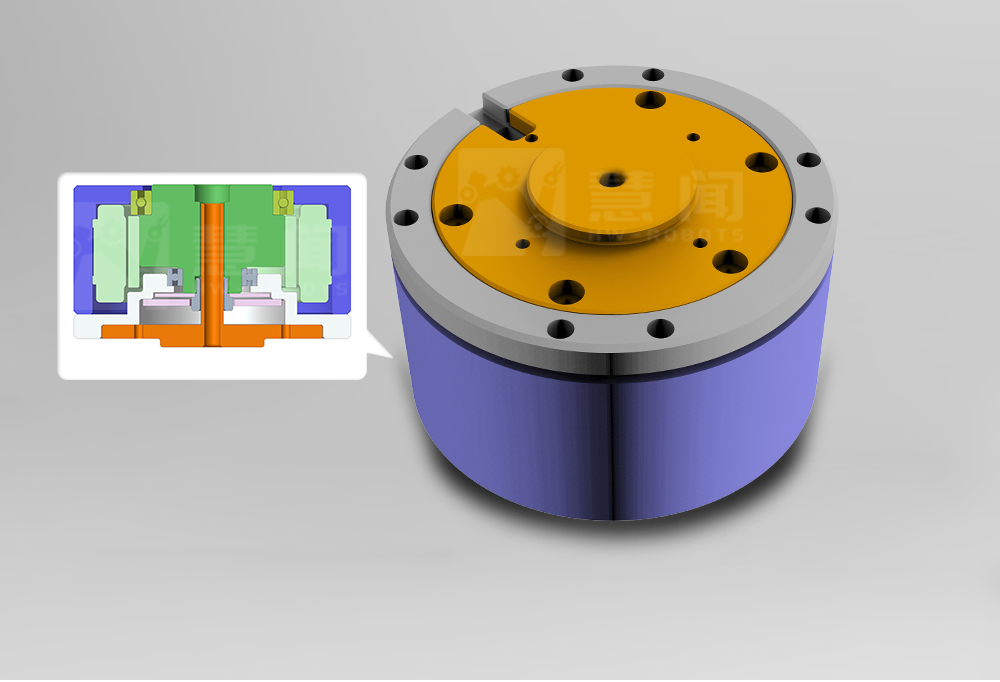
工业机器人控制系统特点,工业机器人是广泛用于工业领域的多关节机械手或多自由度的机器装置。控制系统的任务是根据外骨骼机器人项目研发的作业指令以及从传感器反馈回来的信号,智能外骨骼机器人支配机器人的执行机构去完成规定的运动和功能。如果机器人不具备信息反馈特征,则为开环控制系统;具备信息反馈特征,则为闭环控制系统。根据控制原理可分为程序控制系统、适应性控制系统和人工智能控制系统。根据控制运动的形式可分为点位控制和连续轨迹控制。

我国工业机器人工业进入高速增长期,已接连六年成为全球榜首大商场,工业机器人正被越来越多的运用于制作业的很多范畴。在工业机器人打开一片炽热的一同,其时存在的概念炒作、一哄而上、低端竞赛等不理性现象也引发各界重视。专家标明,阜新外骨骼机器人工业作为“制作业皇冠上的明珠”,应活泼走自主立异、打开中心技能旅程,通过高质量产品和服务来推动智能制作、行进制作业水平,以避免重蹈贱价竞赛、低水平竞赛的覆辙。除此之外,针对国产工业机器人的运用推行,有人建议,要坚持立异规划先行,立异规划是推行机器人的重要条件,要使立异规划与企业原有工艺相结合,要运用自动化、数字化、智能化手法对原有工艺进行改善和重组。智能外骨骼机器人运用还要与大数据、模式识别、虚拟现实、精益出产等相结合,只需通过这些方面的结合,才华把工业机器人用得更好。国产工业机器人远景向好,商场竞赛力不断行进。但与此一同,我国机器人工业打开中的结构性问题也较为杰出,在高端才华不足的一同,存在低端范畴低水平重复建设、盲目打开的隐忧。

阜新外骨骼机器人和协作机器人都是做重复的规定动作,从这点上看没有区别,只有这样自动化程度也才会高。人机协作机器人设计出来的目的就是克服传统机器人的一部分缺点,并且专攻更细的精细操作和定制化操作的市场,并不能取代传统机器人,虽然现在也没有得到大范围的应用,主要看协作机器人的负载,你就知道大型部件是无法加工的。体积小是协作机器人的一个优势,这个优势存在的前提是外骨骼机器人项目研发和传统工业机器人都能够胜任这个任务。因为体积小,重量轻,安装和调试简单,同样的一台机器可以相对方便的移动位置(协作机器人两个人就可以重新布置),重新进行教导,极大的提高了生产线的柔性,减少的投入。而反观传统工业机器人,位置发生些许变化都要人工拿着控制器调半天,更别说如果为了新的生产工序移动位置,整个地板和围栏要重做,基本就跟重新安装一样的麻烦。以机器人为例,因为对他们了解的比较多,他们也在深圳建立了自己的机器人生产工厂。在研发生产协作机器人的时候,他们从最开始研发生产伺服系统及运动控制系统,到转型生产协作机器人关节模组,最后自己主打研发协作机器人,完全国产化的机器人关节模组,到协作机器人,因为专业,所有更加专注,期待深圳 深圳慧闻智能有限公司可以在协作机器人应用领域又更多的突破和发展。

智能机器人按其智能程度的不同,可分为以下三种。(1) 传感型机器人又称外部受控机器人。机器人的本体上没有智能单元只有执行机构和感应机构,它具有利用传感信息(包括视觉、听觉、触觉、接近觉、力觉和红外、超声及激光等)进行传感信息处理、实现控制与操作的能力。 受控于外部计算机,在外部计算机上具有智能处理单元,处理由受控机器人采集的各种信息以及机器人本身的各种姿态和轨迹等信息,然后发出控制指令指挥机器人的动作。目前机器人世界杯的小型组比赛使用的机器人就属于这样的类型。(2) 交互型机器人机器人通过计算机系统与操作员或程序员进行人一机对话,实现对机器人的控制与操作。 虽然具有了部分处理和决策功能,能够独立地实现一些诸如轨迹规划、简单的避障等功能,但是还要受到外部的控制。(3) 自主型机器人;在设计制作之后,机器人无需人的干预,能够在各种环境下自动完成各项拟人任务。自主型机器人的本体上具有感知、处理、决策、执行等模块,可以就像一个自主的人一样独立地活动和处理问题。 机器人世界杯的中型组比赛中使用的机器人就属于这一类型。

我们都知道,在制造业中使用外骨骼机器人项目研发可以优化效率,但还是有不少人对使用机器人存在着一些争议。以下是关于工业机器人,在制造业中使用的利弊分析:优点:1、对于工业机器人来说,成本效益是合理的论据之一。机器人将通过消除内部成本来补偿人员工资,从而降低生产成本。企业预测,一旦他们将机器人投入生产,他们的盈利能力将会提高,或者他们将有更多的资金流动来投资新的产品或技术。2、通过在生产中使用机器,可以保证质量。智能外骨骼机器人将能够确保与大规模生产的制成品保持一致。将消除装配线工人可能造成的人为错误的威胁。缺点:1、到目前为止,失业是制造业中反对使用机器人的主要原因。从入门级到退伍军人,各行各业的工人都担心自己的就业状况是否安全,担心自己的工作能否被机器人取代。与其他行业相比,这种恐慌在这个行业中更为普遍,因为机器人在制造业中的接受程度更强。2、宏观效应通常是另一个与失业有关的话题。更多的“宏观”思想家想知道,当制造业工人的工作岗位被取代时,国内乃至全球经济将受到怎样的影响。如何弥补如此大规模的失业?机器人假定的成功如何受到限制,不渗透到其他行业?
机器人技能是发展最快的工程范畴之一,也是最具有挑战性的一个范畴。几乎一切的机器人,都有不同的操作环境,行为或任务也不同,衔接的传感器和执行器也不同。因此人们经常在不同的硬件平台上运用不同的开发工具来开发机器人。一个工程师开发的成功用于某个机器人的可用操控系统很难再用于另一个智能外骨骼机器人,因为应用于传感、自治和电机操控的应用程序接口(API)在语法上是不同的。在规划、原型开发和布置机器人应用时,面对三个最大的挑战:集成传感器和执行器,实现自治以及布置确定性的操控算法至嵌入式硬件。为了应对这些挑战,提供了一整套全新的机器人专用传感器和执行器驱动,以及实现杂乱导航运算的新代码库。并且,有了智能外骨骼机器人开发人员只需要运用一个软件开发环境就可以规划操控算法,衔接实践I/O,以及布置至确定性硬件方针。

多渠道服务支持

多年经验工程师对接

企业选择应用

可签署保密协议
深圳慧闻智能有限公司
地址:中国·广东省深圳市宝安区福海街道桥头社区立新路2号天佑创客产业园A栋1楼
手机:175-0755-2151
电话:0755-85275462

微信公众号

微信号