本实用新型提出一种大学版智能机器人模块化体系,选用模块化设计思想,将操控、驱动和扩展部分排列处理,智能特种机器人便于教学实验时的教学和了解,该大 学版智能机器人模块化体系具有技能的综合性、多样性、融合性(吸附性)、可实践 性、创新性、趣味性、易上手等特色,它是技能创新与综合并重的产品。为了完成上述发明目的,本实用新型选用的技能计划是,大学版智能机器人模块化体系,包含底盘和无线通信模块,其特征在于,所述体系进一步包含驱动模块,包含设置在所述底盘上的驱动电机、驱动器和电源,以及对称设置在所述底盘 两头的驱动轮,所述电源通过所述驱动电机操控驱动轮的运转,驱动器用于驱 动所述驱动电机,智能特种机器人体系操控模块,包含固定在所述底盘上的主操控器和从操控器, 设置在所述驱动轮前后位置的前后碰撞环,所述两操控器之间进行数据交互传输,并传送操控信号;传感器及扩展模块组成,包含固定在底盘前端的传感器支架、若干传感器固定设置在所述传感器支架上。比较好的是所述驱动模块进一步包含一万向轮,设置在所述底盘上。 比较好的是,所述体系进一步包含若干层扩展支架,纵向设置在所述底盘的从操控器上部,用来放置若干电路板和传感器。选用上述结构的大学版智能机器人模块化体系,具有模块化和可扩展的优点,从空间和功能上均能满足扩展各种传感设备及配件的需求。

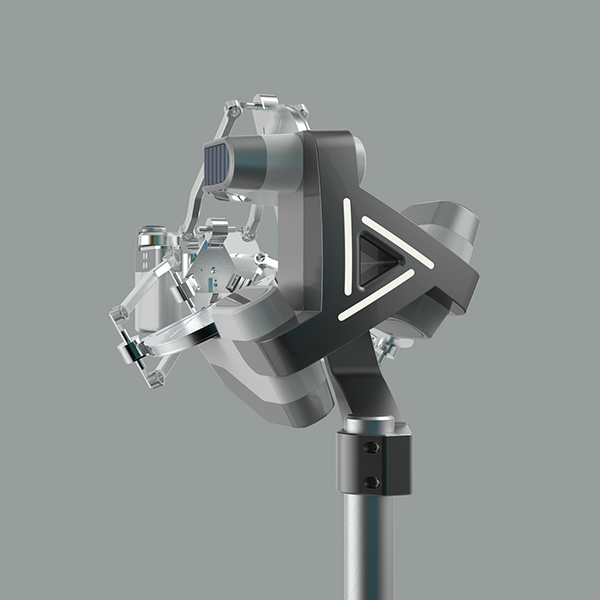
就像动画《战神金刚》一样,将一个个小型机器人组成一个巨型机器人的想法在科幻相关的节目中很常见,而现实中的研究人员也一直在寻求实现这一目标的方法。现在模块化机器人变得更加智能化。智能特种机器人每侧都有轮子,可以使模块向任何方向移动,也能让各个模块通过将末端的磁铁转换成短程无线电来相互通信。每个模块都配有四个连接器,这意味着两个机器人可以以17种不同的配置连接。这就能使它们聚在一起组成一个更大更复杂的机器人。当然,配置模块的过程也存在挑战。为了从一种形式转变为另一种形式,研究人员需要制定一个行动计划,从而使机器人从当前位置转移到它们需要到达的位置。例如,为了将行走机器人转换为带有手臂的特种机器人项目研发,模块之间需要以特定的方式对接和脱离。研究人员计算出了机器人从初始状态到目标状态重新配置的最有效方法。一些配置需要模块相互协助,其中一个模块充当“助手”,将另一个模块移动到位,以便它可以停靠在新位置。而其他的配置则涉及移动一次就形成一个新形状的模块。这样的机器人模块化具有比标准机器人灵活性和适应性都更强的优势,这意味着它们可以自我修复并应对未知环境。它们可用于太空任务和灾难救援任务,或者用作残疾人士的假肢。

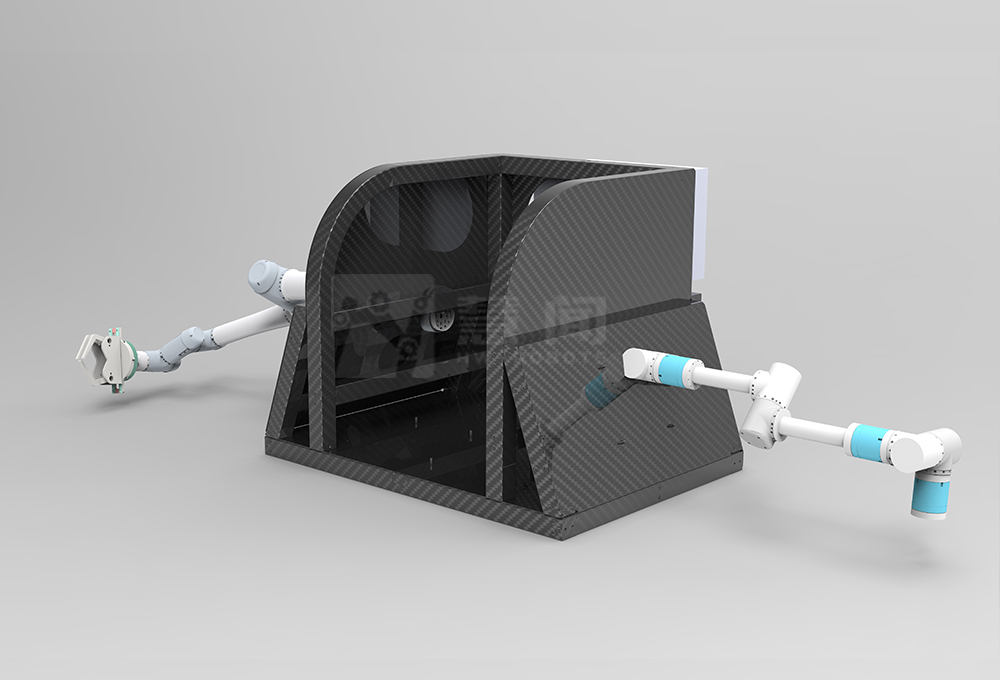
慧闻协作机器人精度和质量;武汉特种机器人具有高度的可重复性,即便在全天候24小时运行的情况下也可以达到 ±0.03mm的精度,可确保缩短周期时间,并减少原材料浪费。除执行生产任务外,配备摄像机系统的机械臂还可以执行3D 测量和测试等质量控制任务。 在进入下一步流程之前识别出故障零件也可以减少浪费。优化效率和劳动力。特种机器人项目研发可以将员工从单调、耗时的任务中解放出来,使得他们有更多的时间专注于附加值更高的任务。在员工从事适合于其技能的任务时,协作式机器人可以执行劳累而又危险的工作,从而保护工人免受因人体工程学差、重复性应力带来的健康风险,或因重型或锋利工件造成的人身伤害。

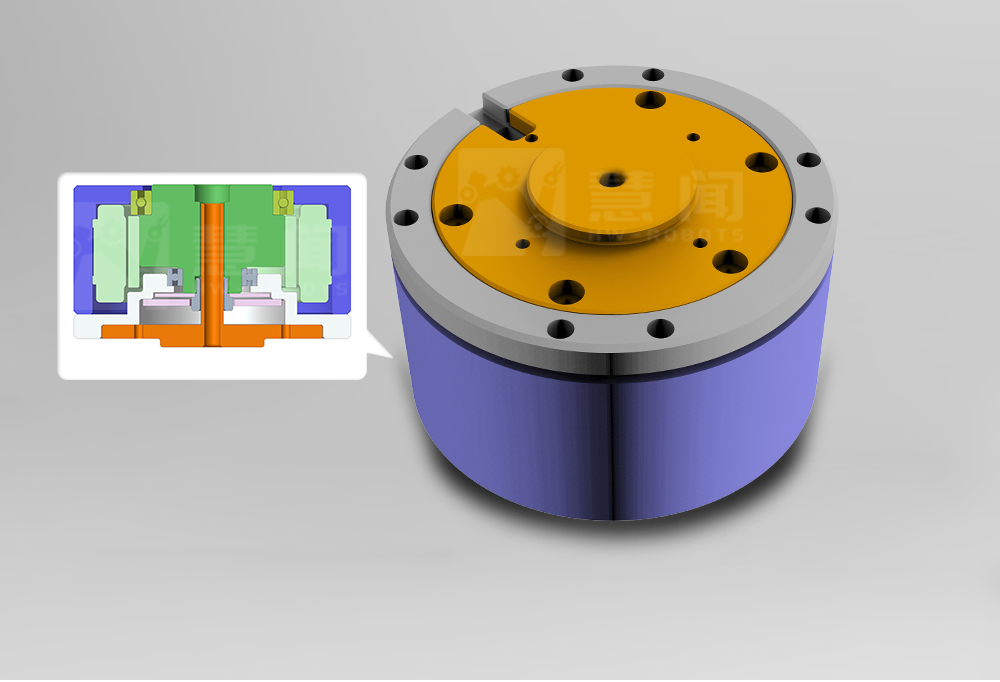
工业机器人的构造是由主体、驱动系统和控制系统三个基本部分组成。主体即机座和执行机构,包括臂部、腕部和手部,有的智能特种机器人还有行走机构。工业机器人共有三大核心零部件——控制器、伺服电机、减速器,占到机器人成本的70%以上。由于在核心零部件发展滞后,目前中国特种机器人项目研发产业的发展面临巨大挑战。工业机器人是指在工业自动化中使用的,固定式或移动式,具有三轴及以上可重复编程、多用途的自动控制操作机。按照机械结构,工业机器人可分为直角坐标型、圆柱坐标型、球面坐标型、垂直 多关节型、SCARA型(平面多关节机器人)及Delta型(并联关节机器人)。几种主要工业机器人的应用范围:最广泛应用者-垂直多关节机器人:广泛用于汽车及电子产业生产制造各工序,结构革新者-Delta机器人:主要用于高速取放、筛选作业,小范围平面作业专家-机器人:主要用于3C行业面内精密装配,线性运动专家-直角坐标系机器人:用于较大工作空间内的物料搬运、取放。
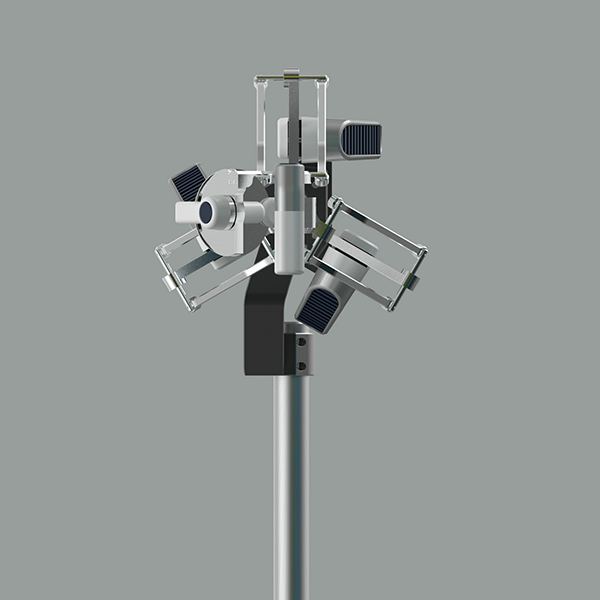
武汉特种机器人每侧都有轮子,能够使模块向任何方向移动,也能让各个模块经过将末端的磁铁转换成短程无线电来相互通信。每个模块都配有四个衔接器,这意味着两个机器人能够以17种不同的装备衔接。这就能使它们聚在一起组成一个更大更杂乱的机器人。当然,装备模块的进程也存在挑战。为了从一种方式转变为另一种方式,研究人员需求制定一个行动计划,从而使特种机器人项目研发从当时位置转移到它们需求到达的位置。例如,为了将行走机器人转换为带有手臂的机器人,模块之间需求以特定的方式对接和脱离。研究人员核算出了机器人从初始状况到目标状况重新装备的最有效办法。一些装备需求模块相互协助,其中一个模块充任“助手”,将另一个模块移动到位,以便它能够停靠在新位置。而其他的装备则触及移动一次就构成一个新形状的模块。这样的模块化机器人具有比标准机器人灵活性和适应性都更强的优势,这意味着它们能够自我修复并应对不知道环境。它们可用于太空使命和灾难救援使命,或者用作残疾人士的假肢。

多渠道服务支持

多年经验工程师对接

企业选择应用

可签署保密协议
深圳慧闻智能有限公司
地址:中国·广东省深圳市宝安区福海街道桥头社区立新路2号天佑创客产业园A栋1楼
手机:175-0755-2151
电话:0755-85275462

微信公众号

微信号